How Can We Help?
Glossary
BARO
A barometer is a scientific instrument that is used to measure air pressure in a certain environment. Pressure tendency can forecast short term changes in the weather. Many measurements of air pressure are used within surface weather analysis to help find surface troughs, pressure systems, and frontal boundaries.
CAN bus
Controller Area Network: a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each others’ applications without a host computer.
Constellation
See GNSS.
DSM
Digital Spectrum Modulation.
EMI Absorber/Shield
The “mRo Super EMI Absorber/Shield” consists of insulation layers, shielding layers, absorbing layers, and nonconductive pressure-sensitive adhesives developed by 3M. These absorbers are typically used for applications requiring both electromagnetic shielding performance and absorption function. It is useful to electrical devices for broadband radio frequency range, including mobile, radios, tuners, LAN, RF blocks, and military equipment.

Flash Memory
Is Non-Volatile Memory (NVM) and is generally used to store information. Although data transfer rates are not as fast as RAM, it is safer for longer-term storage as the data is preserved when power is turned off.
Flight Stack
Is a collection of guidance, navigation, and control algorithms for autonomous drones. It includes controllers for fixed wing, multirotor, and VTOL airframes as well as estimators for attitude and position. For example, PX4 and Ardupilot.

Form Factor
This term is used to specify the size, configuration or physical arrangement, and specifications of device hardware, along with some focus on its internal components. A form factor also serves as a standard or category that can be used to ensure that there is a level of hardware compatibility between devices of similar form factor even though they may come from different manufacturers.
FPU
An FPU is a processor or part of a processor that performs floating-point calculations.
FRAM
FRAM (Ferroelectric RAM) is random access memory that combines the fast read and write access of dynamic RAM (DRAM) – the most common kind of personal computer memory – with the ability to retain data when power is turned off (as do other non-volatile memory devices such as ROM and flash memory).
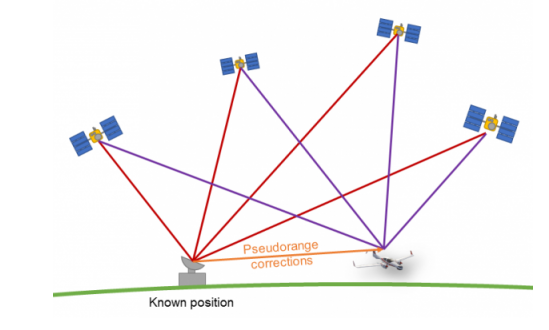
GNSS
Global Navigation Satellite System (GNSS) refers to a constellation of satellites providing signals from space that transmit positioning and timing data to GNSS receivers. The receivers then use this data to determine location.
By definition, GNSS provides global coverage. Examples of GNSS include Europe’s Galileo, the USA’s NAVSTAR Global Positioning System (GPS), Russia’s Global’naya Navigatsionnaya Sputnikovaya Sistema (GLONASS), and China’s BeiDou Navigation Satellite System.
Ground Plane
A ground plane is basically just a conductive plate that is placed between the flight controller and the bottom of the antenna to shield the frame electronics from RF interference.
The ground plane also effectively enlarges the area of the antenna, thus increasing reception and improving the vertical and horizontal position estimates. Without a proper ground plane, you will not get a proper 3D lock on most copters.
I²C
Inter-Integrated Circuit: I2C is a serial protocol for two-wire interface to connect low-speed devices like micro controllers, EEPROMs, A/D and D/A converters, I/O interfaces, and other similar peripherals in embedded systems. It was invented by Philips and now it is used by almost all major IC manufacturers.

IST8310
iSentesk IST8310 is a 3-axis digital magnetometer. It is an integrated chip with 3-axis magnetic sensors, digital control logic, a built-in temperature compensation circuit, and self-test function.
JTAG
(Joint Test Action Group): this interface/port can be used to connect a probe to a chip, allowing for a developer to manipulate the chip and its connections to other chips. Developers can also use this interface to copy firmware to non-volatile memory within an electronic device.
LED
Light-emitting diode.
LIS3MDL
The LIS3MDL is an ultra-low-power, high performance, three-axis magnetic sensor.
Magnetometer
An instrument for measuring the strength and sometimes the direction of magnetic fields, including those on or near the Earth and in space.
MCU
Micro Controller Unit.
PPM
Pulse Position Modulation: signal modulation in which a set number of message bits are encoded by transmitting a single pulse in one of 2 possible (number if message bits) time-shifts.
PPS
PPS stands for “pulse-per-second” and is an electrical signal used in time synchronization applications. The pulse is transmitted by a pulse generating device to one or multiple pulse consuming devices. The aim is to accurately synchronize the pulse consumers’ clocks to the pulse generator.
Processor
Is the logic circuitry that responds to and processes the basic instructions that drive a computer. The CPU is seen as the main and most crucially integrated circuitry chip in a computer, as it is responsible for interpreting most of computers commands. CPUs will perform most basic arithmetic, logic and I/O operations, as well as allocate commands for other chips and components running in a computer.
Protocols
Communications between the flight stack and ground control.
PWM
Pulse Width Modulation: the square-wave signals used in RC control to drive servos and speed controllers.
RAM
Random Access Memory: generally used to manage any information that has been stored. RAM can typically transfer data faster than flash, although it suffers from an important characteristic: it can only hold onto that data when it has power; once the power is turned off, the data is lost. Hence, it must be stored for the longer term in flash memory.
SBUS
This is a digital communication protocol used in R/C receivers. It uses digital serial data communication technology to transmit control signals between your receiver and servos. More than that, it allows us to transmit many channels digitally from the receiver to the flight controller.
SPI
Serial Peripheral Interface is a synchronous serial communication interface specification used for short-distance communication, primarily in embedded systems.
Telemetry
A two-way digital data stream between a UAV and a ground station that is used to communicate flight data and instructions to control the UAV.
UART
Usually several UART ports are provided. These provide connections to Telemetry radios, GPS, Rangefinders, and even SBUS servos. In addition, as of firmware versions 4.0, serial RC receiver inputs can be connected to any UART.
UAVCAN
UAVCAN is a lightweight protocol designed for reliable communication in aerospace and robotic applications via CAN bus. The UAVCAN network is a decentralized peer network, where each peer (node) has a unique numeric identifier (node ID) that is the only parameter that needs to be set for basic setup.
U-blox M8N Module
The NEO-M8 series utilizes concurrent reception of up to three GNSS systems (GPS/Galileo together with BeiDou or GLONASS), recognizes multiple constellations simultaneously, and provides outstanding positioning accuracy.

U-blox M9N Module
The NEO-M9N module is built on the robust u-blox M9 GNSS chip, which provides exceptional sensitivity and acquisition times for all L1 GNSS systems. The u-blox M9 standard precision GNSS platform, which delivers meter-level accuracy, succeeds the well-known u-blox M8 product range.

U-blox SAM-M8Q
The SAM-M8Q module utilizes concurrent reception of up to three GNSS systems (GPS, Galileo, and GLONASS), recognizes multiple constellations simultaneously, and provides outstanding positioning accuracy. For even better and faster positioning improvement, SAM-M8Q supports augmentation of QZSS, GAGAN, and IMES together with WAAS, EGNOS, and MSAS. SAM-M8Q also supports message integrity protection, geofencing, and spoofing detection with configurable interface settings to easily fit to customer applications.
USB
USB is provided as the primary port for configuration of the Autopilot and GPS.