How Can We Help?
mRo KitCAN M10025

Background/History of the Product:
The mRo KItCAN is a powerful kit of features+firmware via CAN that tackles most of the robotic applications out there. With just 4 wires [CAN], you can cleanly have access to the most powerful magnetometer available today, the best barometric pressure sensor we’ve ever used, GPS+I2C ports that support all legacy uBlox GPS sensors. If that is not enough, it also includes an RGB LED and Arm Switch/Button.
3D Model








Quick Start
Parameters
Make sure you are using the latest version of Mission Planner. With the following firmware versions or newer:
| Parameter | Value |
| ArduPlane | V4.0.5 |
| ArduCopter | V4.0.3 |
| ArduRover | V4.0.0 |
Go to Full Parameter Tree on Mission Planner and verify those are enabled (some firmware versions are enabled by default, others are not).
| Parameter | Value |
| CAN_P1_DRIVER | 1 |
| GPS_TYPE | 9 UAVCAN |
Make sure the UAVCAN compass driver is not disabled (UAVCAN should be unchecked).
If your controller has more than 3 internal compasses, you should disable the least important one:
| Parameter | Value |
| COMPASS_TYPEMASK | UAVCAN (Unchecked) |
Remember that mRo X2.1 Red Board has the CAN signal H and L crossover. MCU: STM32F303 ARM Microcontroller.
Pinouts
NOTE: Pinouts are from the Autopilot perspective
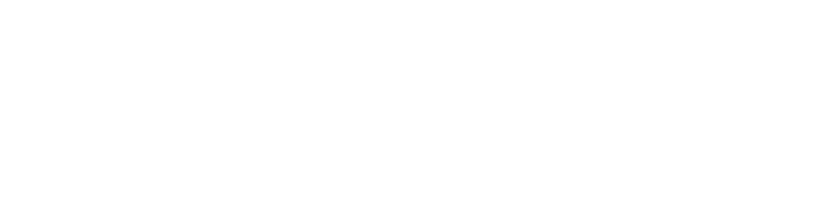
Basic GPS Port
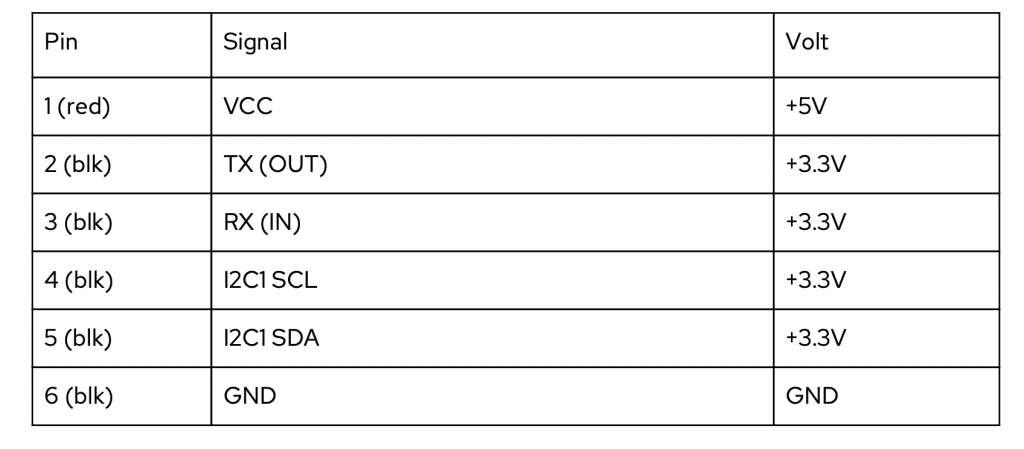
CAN Port
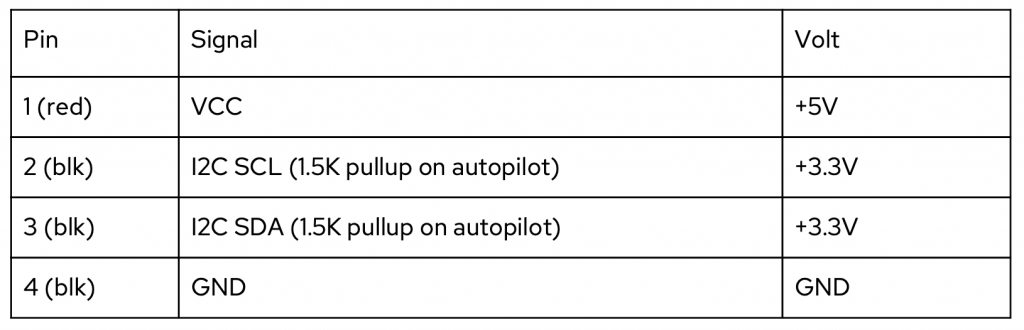
I²C Port