How Can We Help?
mRo Pixracer R15

Background/History of the Product:
PixRacer has all the capabilities of the original Pixhawk (including version 2) and even more! It is optimized in size and has just about the right amount of inputs/outputs that allow you to switch from a full-enriched autopilot stack system (with auto landing and full navigation) to a high-performance racing platform.
R15 has an updated accelerometer/gyro, magnetometer, and is ROHS (Lead Free). It also includes an ESP8266 for easy WiFi updates and comes with the latest Ardupilot ESP8266 firmware developed by Andrew Tridge. This new firmware has a nice web interface, MavLink2 support, and an easier way to do future updates via the web interface.
Specifications
| Specifications | mRo PixRacer R15 |
| Main Processor | 32-bit STM32F427 Cortex M4 core with FPU rev.3 168 MHz |
| IO Processor | No |
| RAM | 256 KB RAM |
| Flash | 2 MB FRAM |
| Crypto / Hash Processor | No |
| Accelerometers / Gyros / Mags | 2 / 2 / 2 |
| Sensors | Invensense/TDK ICM-20602 (6DOF) Invensense/TDK MPU-9250 (9DOF) |
| Sensors – Dampened | None |
| Internal Magnetometer | AK8963 inside MPU-9250 and ST LIS3MDL |
| Barometer | MEAS MS5611 |
| Interfaces and Protocols | 5x UART (serial ports) 2x with HW flow control and GPS+I2C®]. 1x PPM sum input signal 6x PWM outputs 1x RSSI (PWM or voltage) input 1x I2C 1x SPI 1x CAN 1x JTAG (Debuging & programming interface) 8x OneShot PWM output (Configurable) 1x External microUSB port Dronecode Debug connector. WiFi Telemetry & firmware update via ESP8266 (Included). JST-GH connectors using Dronecode connector standard. Supported RC input protocols: Spektrum DSM / DSM2 / DSM-X® Satellite compatible input up to DX9 and above. Futaba S.BUS® & S.BUS2® compatible input. FRSky Telemetry port output. Graupner SUMD.Yuneec ST24. |
| Connectors | -JST GH series connectors -Servo Header -Onboard MicroUSB- 2x 5 header (Esp-01) |
| Pin Headers | Yes |
| Conformal Coating | Available |
| Extended Testing and Burn In | No |
| Custom Carrier Board Support | No |
| LED | Yes |
| Dimensions | Width: 36mm (1.42”)Length: 36mm (1.42”) |
| Weight | 10.54g (.37 oz) |
| Mounting Holes | 30mm x 30mm (1.18″x1.18″) |
| Protector Case | Optional |
| Typical Platforms | -Multirotor -Rover -Fixed-Wing -Boats -Submarines -VTOL -Automatic Tractors -Others |
3D Model

Firmware
The mRo Pixracer R15 is compatible with the following firmware:
ArduPilot
-ArduCopter 4.x
-ArduPlane 4.x
-ArduRover 4.x
PX4
-PX4 V1.8 (and further versions)
Normal Usage Guide
All connectors follow the Dronecode connector standard. Unless noted otherwise, all connectors are JST-GH.
Pinouts
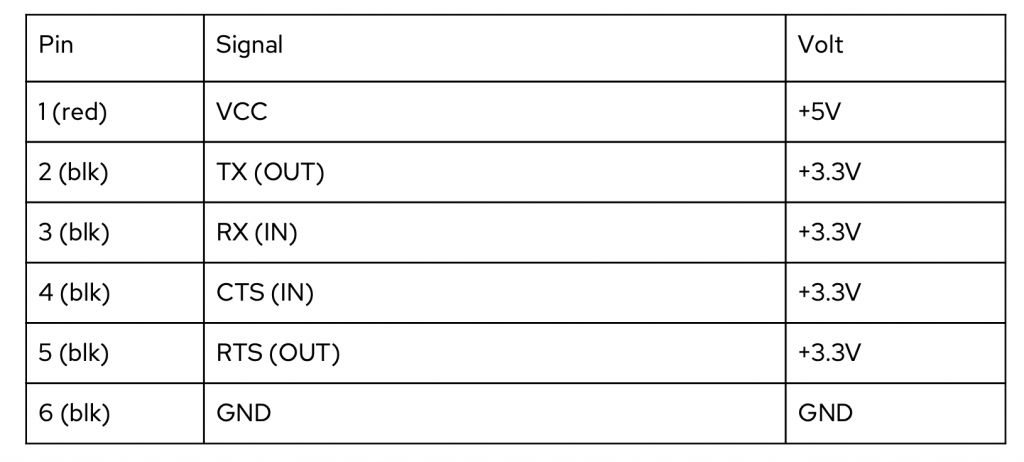
Telemetry Ports
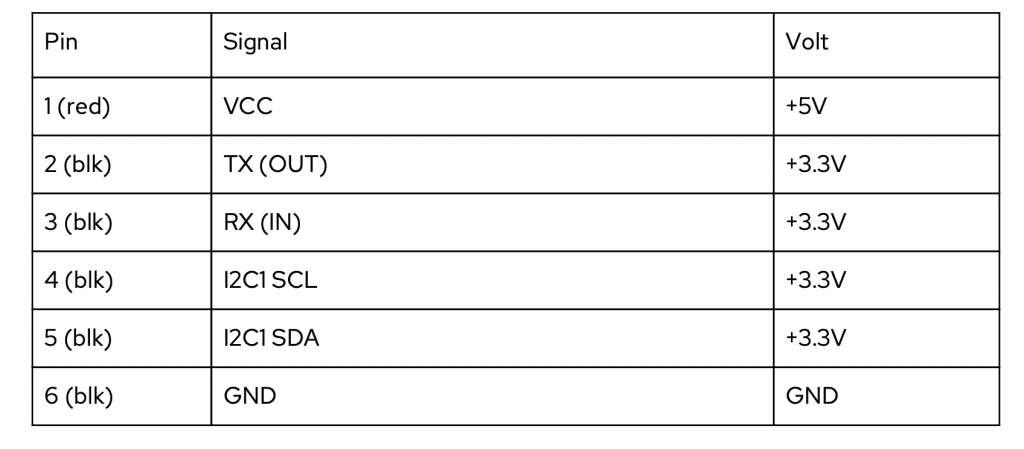
Basic GPS Port
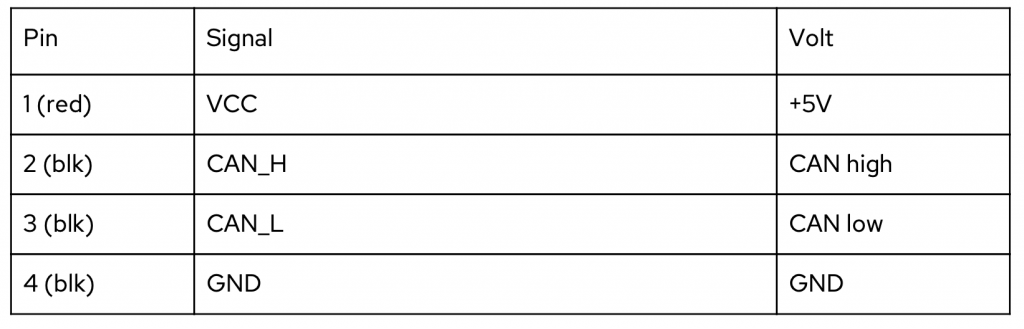
CAN Port
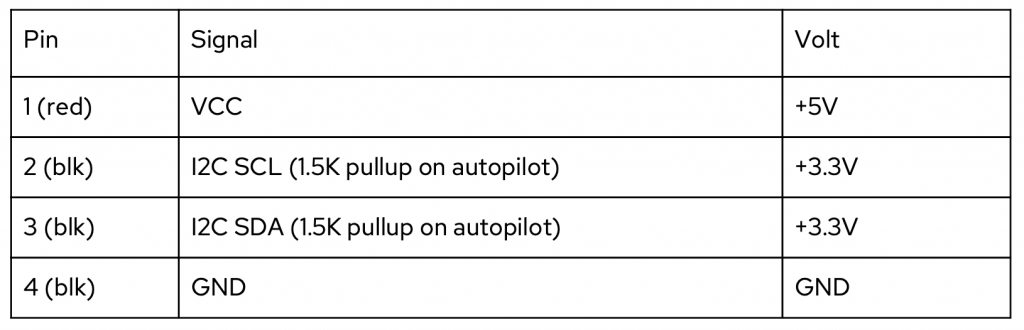
I²C Port
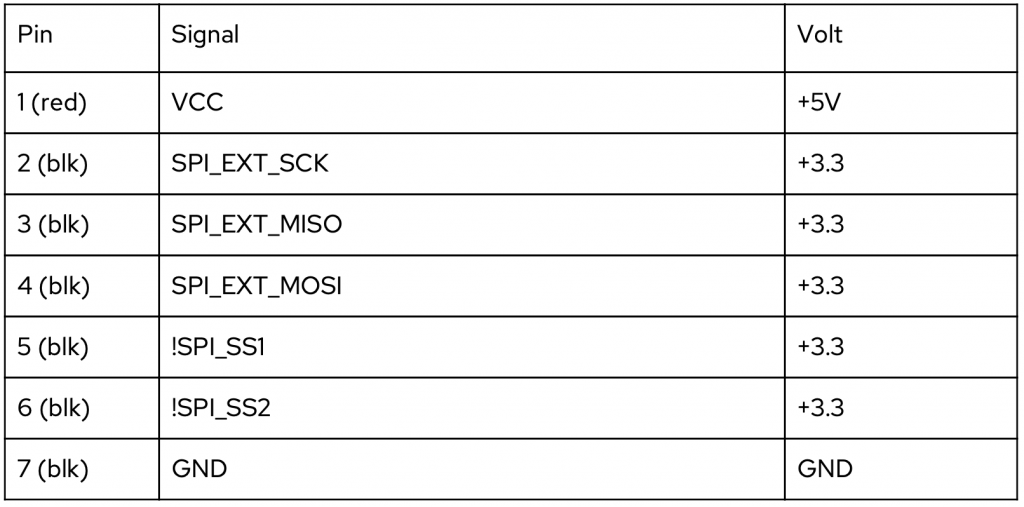
SPI Port
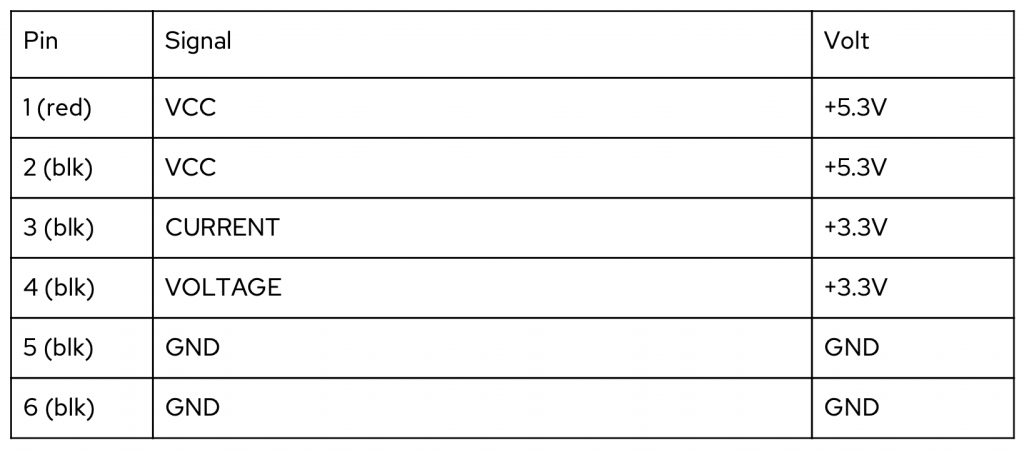
Analog Power Port
Tutorials
First Time Setup
CAN Bus Setup
UAVCAN Setup
Advanced Configuration