How Can We Help?
mRo SAM GPS + IST8308 Mag (Med Size) MRO10038

Background/History of the Product:
The mRo SAM GPS V2.0 is based on the old and now retired mRo mini SAM. The main difference is that it uses an ideal ground plane of 40mm x 40mm as recommended by uBlox. This makes it a little heavier at 10.3 grams versus 7.6 grams, but it also gives you an increase from ~22 dB-Hz to ~34dB-Hz, which is a lot of gain for just 2.7 grams! We saved some weight with a new generation, smaller rechargeable coin battery and a thinner PCB.
Compared to the IST, the IST8308 has less temperature drift, more sensitivity, and a built-in noise filter. Older GPS versions used the LIS3MDL, which doesn’t even come close to the performance of the old IST8310, let alone the IST8308.
mRo SAM GPS + IST8308 Mag (Med Size) Supports: Ardupilot and PX4.
Specifications
| Specifications | mRo SAM GPS + IST8308 Mag (Medium Size) MRO10038 |
| Ground Plane | 31mm x 31mm |
| Constellations | USA (GPS), Russia(GLONASS), and Europe (Galileo). China can be enabled (BeiDou). |
| Compatibility* *See full compatibility chart for supported flightstack versions | IST8308 supports: Ardupilot |
| Compass | IST8308 |
| Barometer | No |
| RTK ready | No |
| USB Port | No |
| CAN ready | No |
| Minimum and Maximum Operating Temperature | -20 ~ 80 °C |
| LED | Yes |
| Dimensions | 31mm x 31mm x 11.5mm |
| Weight | 7.86 grams (.28 oz) |
| Mounting Holes | No |
| Case | Optional |
| Connectors | -6-Pin JST-GH-Auxiliary Port I²C |
| Includes | 1x mRo uGPS ublox Sam M8Q.1x 6-Pins JST-GH to 6-Pins JST-GH – MRC02061x 6-Pins JST-GH to 6 Separate 2.54mm Females – MRC0202 (For project versatility) |
| Typical Platforms | -Multirotor -Rover -Fixed -Wing -Boats -VTOL -Automatic Tractors -Others |
| Other Features | *Lightest GPS version , 7.86 grams (.28 oz)*PPS/GND signal pads*Rechargeable battery*Status LED*Standard JST-GH (GPS and I2C) |
3D Model

Firmware
Compatible with:
ArduPilot
- Arducopter 4.x
- ArduPlane 4.x
- ArduRover 4.x
PX4
- V1.10
- V1.9
- V1.8
Normal Usage Guide
All connectors follow the Dronecode connector standard. Unless noted otherwise, all connectors are JST-GH.
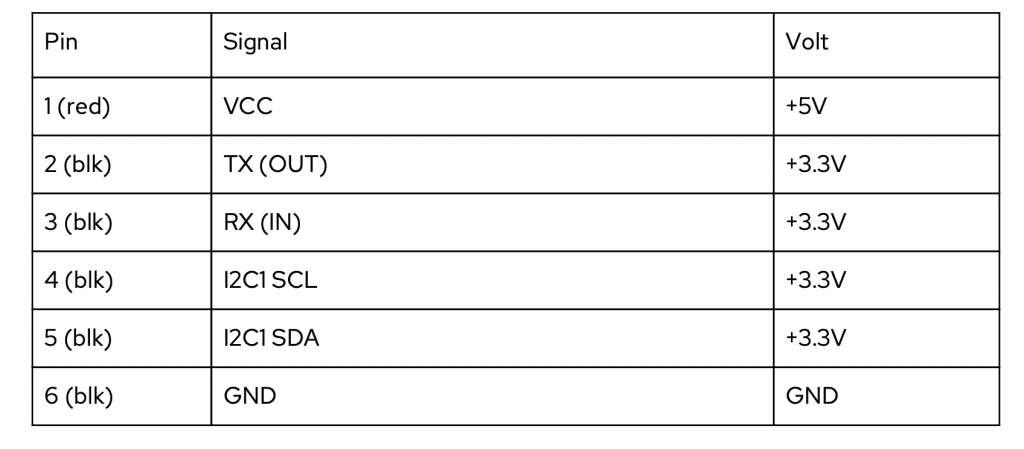
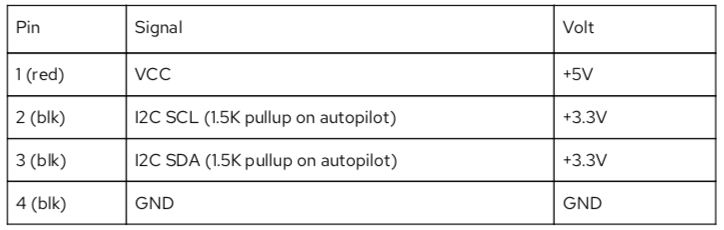
Pinouts
NOTE: Pinouts are from the Autopilot perspective
I²C Port
GPS Port