
A University of Baja California (Oceanographic Research Institute) required us (mRo) to develop a fix-wing UAV. It had to be small/portable and capable of carrying a multispectral camera that would be used for oceanography research. The camera would be a Parrot Sequoia and of course… it had to be very cheap due to budgetary constraints.

After searching all airframe manufacturers in several galaxies (98% located in China), we came across the Nano Talon.


Naturally, we ordered one for testing. Soon after arrival, we were quickly amazed by it (after many airframes, we can “see” right away if it’s going to be good). It met all the requirements: extremely affordable, small, camera-bay, and fast! We also loved how easy it was to remove the wings and transport it – the ailerons were mechanically connected to the body, so there was no need for plugging any servos or inserting support rods. Just plug and fly!
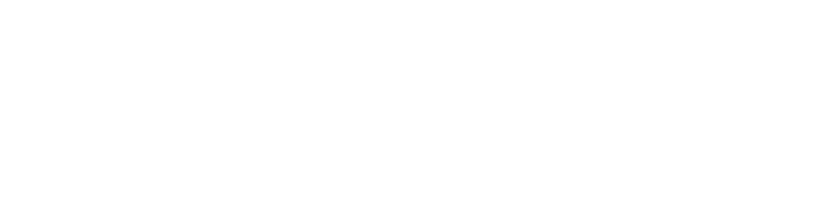
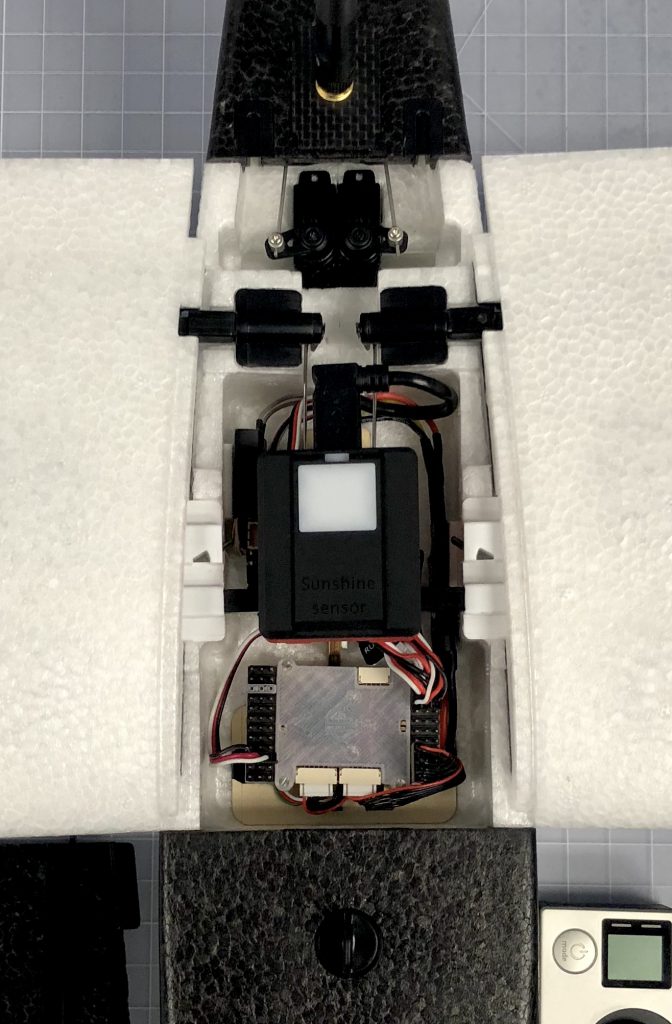
X2.1 Inside.
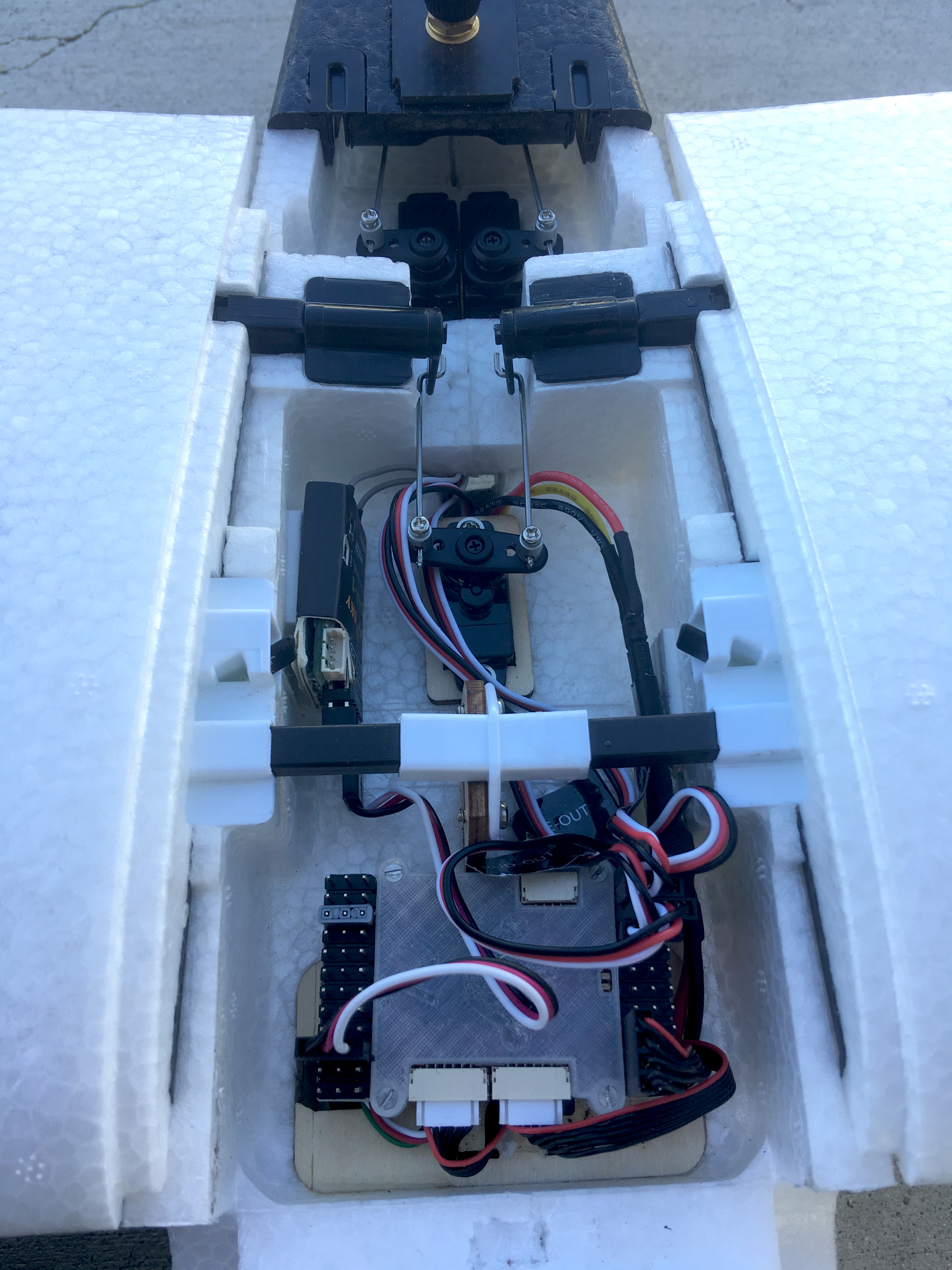
Battery bay with Custom 3D Printed GPS/Airspeed mount.

Custom Pitot Tube Mount.
Yet, we needed to test it in the real world. Winds in Southern California and North of Baja California usually come from the Pacific Ocean as wet, cold, and blowing eastbound. Or in some cases, we suffer from a rare weather condition known as Katabatic winds (locally known as Santa Ana winds) which come as dry, hot air that easily exceeds 20 knots westbound and takes your airplane away into the ocean. So in a real-life situation, we needed an airplane fast enough to cope with such forces if the conditions required it.

Flying Gang, testing multiple platforms. Baja California.
We always advise users to do their homework and check the weather (METAR and Forecasts) and totally avoid bad weather conditions or even sudden Katabatic winds.

Sleeping? Well, the Nano Talon breaks into the wind just nicely. The only minuscule disadvantage is that it comes in fast when landing, which might be a problem for inexperienced pilots. Not a problem for us because we have very long coastlines where we can land nicely. If you have experience flying Delta Wings or the FunJet, then you will find it very easy and fun to fly.

Hard landing testing.
So we got our airplane. Now we needed a nice flight controller that would take up minimum space. What would that be? Pixhawk 1 was out of the question – too big and maybe old, so we quickly thought that PixRacer would be the best option. But, the Research Center needed more IOs for future use, so we decided to fit it with the “PixRacer big brother”, the X2.1, with headers mounted vertically for easy access:
X2.1 (Bottom), Parrot Sequoia (Top).
So far, so good! After fitting the rest of the electronics, including the next generation Hall-sensing to measure current and some FPV gear, we continue to do more tests. After a few flights, my engineers totally fall in love with it! It was just practical, and when you get to the field, you can just get into the air immediately. So we determined that this could be the perfect platform to start learning autopilots, and if you needed a frame that allowed you to add your own sensors and cameras quickly so you could get into the air in no time, this would be it!
This how the mRo Nano Talon project started – an airplane originally intended for a specific task, but we like it so much that we are happy to introduce it and announce that we are getting ready to offer this small-size, ready to fly, fully autonomous, fix-wing.
The kit will include the airframe, servos, motor, ESC, mRo X2.1 Autopilot, mRo GPS M8N, Telemetry, LIPO battery, and optional FPV gear; assembled, tested, and pampered all from California for just… less than $500 for sure. Stay tuned for more news!
More about the application:
The Oceanographic Research Institute requirements also included an off-coast autonomy of 3km in order to reach a scan area of 50 acres, get there and perform its mission, and still have enough juice to return home safely.
Captured ocean water by infrared satellite imagery close to the coast (up to 10km away) cannot be efficiently used to run the calculations needed by the research center. Somehow, the heat reflection from the land interferes with their algorithms, but those problems are mitigated if the images are taken from a closer distance; this and the fact that the affected area is less than 10km away from shore, making this platform the perfect vehicle for this kind of mission.
This platform will also help researchers inspect fishery/fish-harvesting areas, have an early red tide detection, and spot the presence of contaminants in the water like oils and other materials.
Phew! I need a beer… cheers.